
Ученые сконструировали биоморфного подводного робота для спсения морских обитателей в случае экологической катастрофы
Разработка поможет в управлении биоресурсами, экологическом мониторинге, поиске и сопровождении объектов под водой. Также проект позволит ученым расширить фундаментальные знания, изучить механику передвижения живых организмов, принципы оптимизации энергопотребления, системы принятия решений


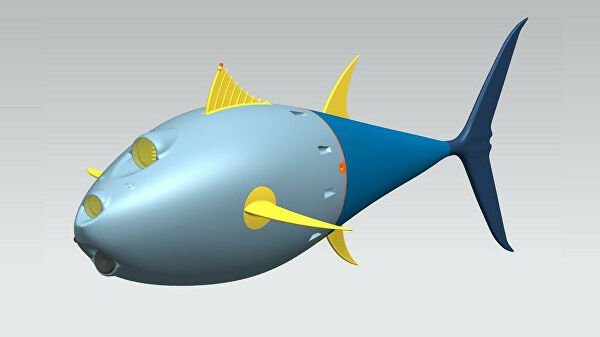
Фото: Пресс-служба БФУ им. И. Канта
Сотрудники Центра нейротехнологий и машинного обучения Балтийского федерального университета (БФУ) им. И. Канта создали ходовой макет подводного биоморфного робота-тунца, который сможет управлять движением косяков рыб в случае экологической катастрофы, сообщили в пресс-службе вуза.
Как отметил ведущий научный сотрудник Центра нейротехнологий и машинного обучения БФУ Виктор Казанцев, подобное подводное устройство в России было создано впервые. "Разработать любой аппаратно-программный комплекс, будь то самокат или самолет, достаточно сложно. В нашем же случае, эта задача уже решена самой природой, в том числе с точки зрения энергопотребления и функционала. Нам нужно всего лишь правильно скопировать алгоритм — создать цифровой двойник живого организма. Но насколько трудоемко создавать абсолютные копии, не зная исходного кода! Например, мы знаем, что рыба плывет так, а не иначе, чтобы минимизировать потерю своей энергии. Но как она пользуется при этом ресурсами своего организма? Вот, что нам предстоит узнать", — рассказал он.
"Представьте, если в океане произошла экологическая катастрофа, например, разлив нефти. В таком случае робот способен в качестве лидера или условного хищника увести косяк рыб в безопасное место. Недавно одна канадская компания стала активно использовать птицеподобных роботов в аэропорту, чтобы отпугивать настоящих пернатых подальше от взлетной полосы. Востребованность таких устройств очевидна", — объяснил Казанцев.
Ученые работают над созданием искусственного интеллекта, который позволит роботу принимать самостоятельные решения, ведь под водой он не сможет подключаться к системе GPS.
Созданный в БФУ ходовой макет робота-тунца может самостоятельно двигаться не только по прямой траектории, но и поворачивать. Однако впереди еще много работы. "Наш тунец будет "обитать" в трехмерном пространстве, поэтому впереди разработка и подбор двигателя, аккумуляторов, датчиков зрения, эхолокации и т.д. Важно разработать систему искусственного интеллекта, чтобы рыба была автономным аппаратом. И вся эта "начинка" должна поместиться в корпусе, который полностью воспроизводит облик живого тунца для органичного единения с естественной средой обитания", — добавил Виктор Казанцев.
Проект БФУ по разработке нейроморфной системы управления подводного биоморфного робота поддержан грантом РНФ 2021 года.

